Adaptive AUTOSAR Overview
What is Adaptive AUTOSAR:
a standardized middleware/architecture definition of automotive software for future high performance computing ECUs. It does not define a concrete design/implementation like Classic AUTOSAR but leave a certain degree of freedom for the development.
Internal interfaces between the building blocks of the AUTOSAR Adaptive Platform shall not be standardized.
Adaptive AUTOSAR Platform address following software building block functions over a POSIX base Operating System:
Runtime: Execution Management, State Management, Log and Trace, Core, OS Interface.Communication: Communication Management, Time Synchronization, Raw Data Stream, Network Management.Storage: Persistency.Safety: Platform Health Management.Security: Cryptography, Intrusion Detection System Manager, Firewall.Diagnostic: Diagnostic Management.Configuration: Update and Configuration Management, Vehicle Update and Configuration Management, Registry.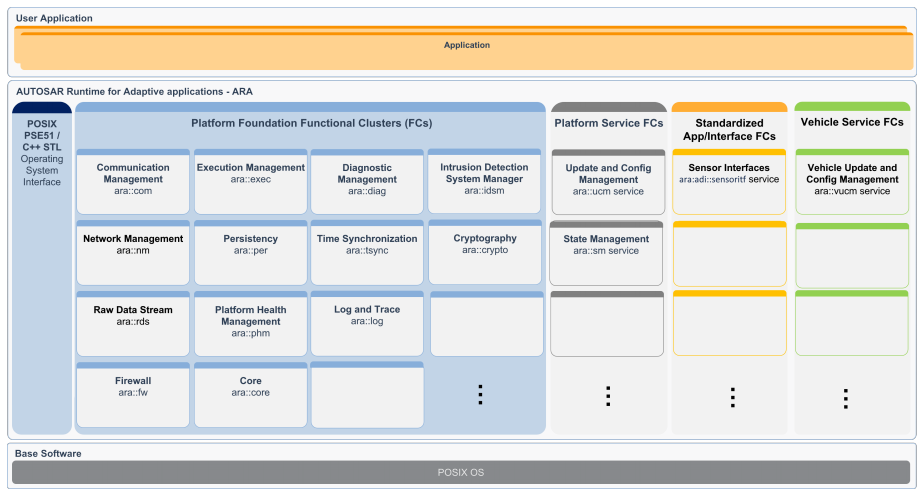
Adaptive Application[AA]: user-level component that implements most of the project/ECU specific functionalities, and run on top of the environment(ara), which is provided by Platform components(FC).
Functional Clusters[FC]: logical group of functionality, sub-component of above building blocks(2nd level of abstraction). Could be implemented as a library or processes (Library-based or Service based), which belong to either Adaptive Platform Foundation, Adaptive Platform Services, Standard Application/Interfaces or Vehicle Services.
Adaptive Platform[AP] Foundation: group of Functional Cluster that provide fundamental functionalities
Adaptive Platform Service: group of FC that provide standardized services
Why Adaptive AUTOSAR:
- Increasingly
computing powerprovide by embedded processor both in term of processor core computing power and number of cores. - Adoption of
Automotive Ethernetintroduce larger communication bandwidth. - Increase in
highly complex functionalities, and demand for a more dynamic, flexibility of vehicle architecture.
⟹ Adaptive AUTOSAR is introduced to address these necessity(V2X communication, computing power, complex functions, scalability, upgradeability), not to replace the existed Classic AUTOSAR(safety critical actuator function) or other Non-AUTOSAR-IVI/COST but to interact with existed vehicle system and other infrastructures outside of vehicle.
Adaptive AUTOSAR use C++ 14 standard, service oriented architecture, it offer flexibility during development and deployment at running, but still dynamic behavior of the system can be limited/restricted by system integrator via Execution Manifest (planned dynamic).
Example of reduced behavioral dynamics (communication, memory, execution & timing):
- Pre-determination of the service discovery process
- Restriction of dynamic memory allocation to the startup phase only
- Fair scheduling policy in addition to priority-based scheduling
- Fixed allocation of processes to CPU cores
- Access to pre-existing files in the file-system only
- Constraints for AUTOSAR Adaptive Platform API usage by applications
- Execution of authenticated code only
⟹ SUMMARY: Adaptive AUTOSAR = High performance/multi-core SoC + Automotive Ethernet + POSIX OS(PSE51) + Services-Oriented-Architecture.
| Adaptive Platform Functional Cluster | SHORTNAME (used e.g. in namespace and include structure) | Log&Trace Context ID |
|---|---|---|
| Adaptive Platform Core | core | #COR |
| Communication Management | com | #COM |
| Cryptography | crypto | #CRY |
| Diagnostics | diag | #DIA |
| Execution Management | exec | #EXE |
| Firewall | fw | #FWX |
| Intrusion Detection System Manager | idsm | #IDS |
| Log and Trace | log | #LOG |
| Network Management | nm | #NMX |
| Operating System Interface | n/a | #OSI |
| Persistency | per | #PER |
| Platform Health Management | phm | #PHM |
| Raw Data Stream | rds | #RDS |
| State Management | sm | #SMX |
| Time Synchronization | tsync | #TSY |
| Update and Configuration Management | ucm | #UCM |
| Vehicle Update and Configuration Management | vucm | #VUM |
| Safe Hardware Accelerator | shwa | #SHA |
I. Overview Functional Clusters (Building Block)
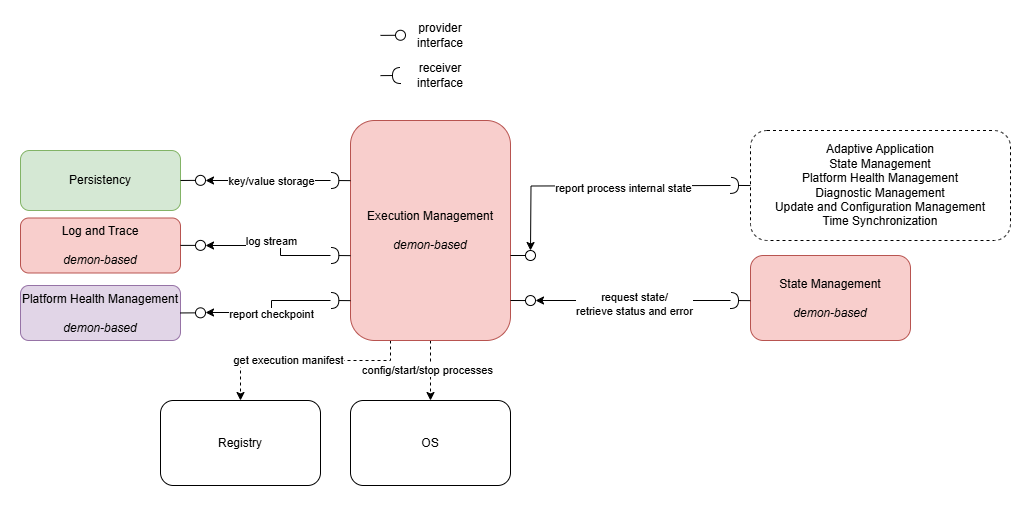
daemon-based: process that run in the background.
Machine: is quasi a virtualized ECU-HW, an entity where software can be deployed to. In this spirit, one real ECU-HW could run several Machines, even though the methodology will not detail this. In the simplest case there is a 1:1 mapping between a Machine and a ECU-HW.
NOTE: following diagrams serve as an initial reference of FC interfaces. It does not address all possible Adaptive Platform FC interfaces, which is depended on the specific Vendor’s interpretation and implementation.
I.1 Runtime
Execution Management: responsible to control Processes of the AUTOSAR Adaptive Platform and Adaptive Applications (i.e. starts, configures, and stops Processes)
- entry point of AUTOSAR Adaptive Platform, started by OS during system boot
- control startup/shutdown of AUTOSAR Adaptive Platform
- configure process resource (CPU time, memory) base on Manifest
- optionally support authenticated boot
Concept:
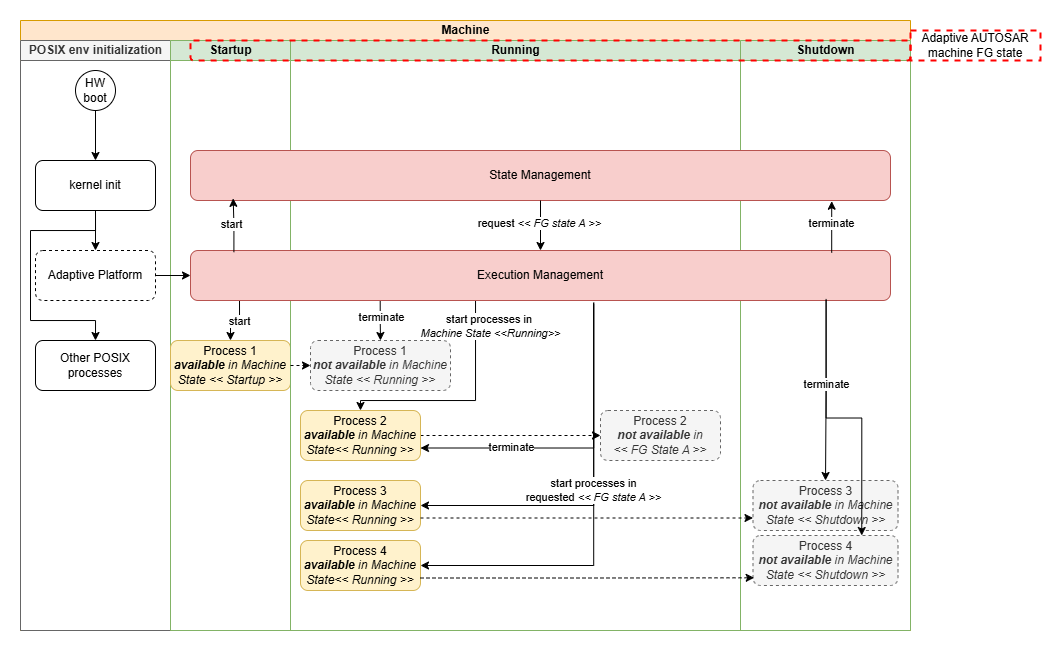
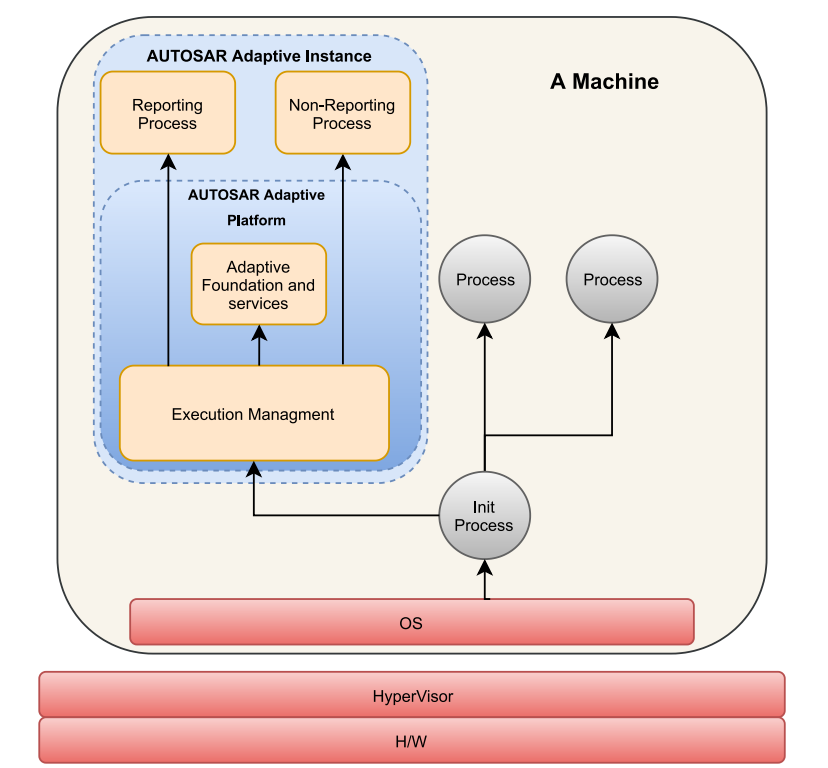 Startup sequence: OS or hypervisor initialize then start the
Startup sequence: OS or hypervisor initialize then start the Execution Management as the 1st Adaptive AUTOSAR process ⟹ EXEC then start other FCs or AAs according to Manifest, authentication boot shall be performed as well and started processes state shall be notified to PHM for follow-up supervising activities.
- Machine Functional Group(FG) State: group of processes(Adaptive Platform FC, Adaptive Application) available at certain
Machine State(.e.g Startup, Running, Shutdown) - FG State: group of processes available at
requested FG Stateby State Management (.e.g Startup, Driving, Restart, Parking,…) - Process/Execution State: state of process (.e.g. Initializing, Running, Terminating)
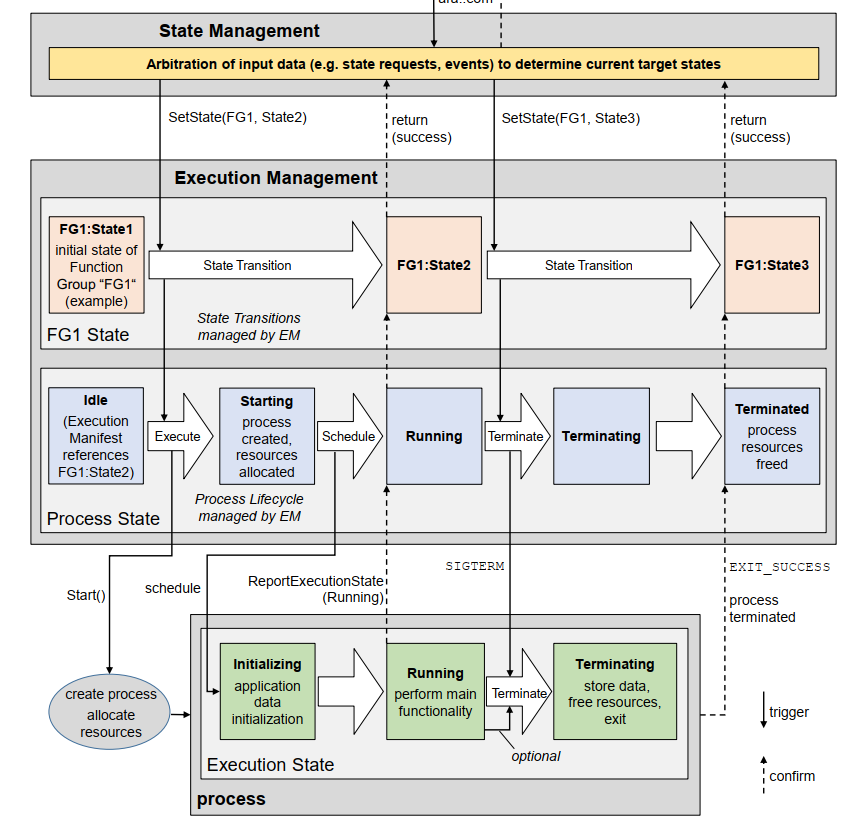
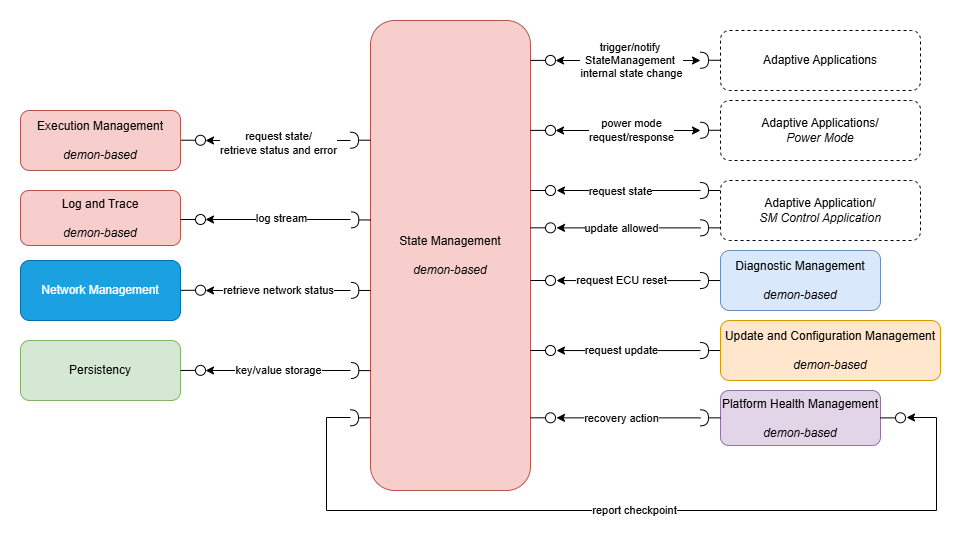
State Management: based on various application-specific inputs, determines the desired target state of the Adaptive Applications
- state management operation is
application-specific - the state control action is delegated to Execution Management (i.e. state = set of active Function Group State)
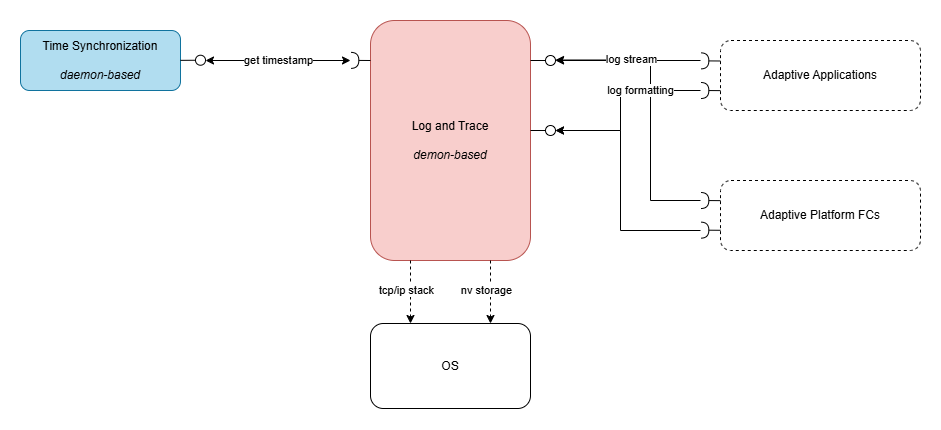
Log and Trace: provides functionality to build and log messages of different severity to different sinks(e.g. network, a serial bus, the console, and to non-volatile storage).
- provide log stream for different severity level
- configurable output format and sinks
Adaptive Platform Core: provide functionality for initialization and de-initialization of the AUTOSAR Runtime for Adaptive Applications as well as termination of Processes.
- defines set of
common data typesused by multiple Functional Clusters as part of their public interfaces. - provides
global initialization and shutdown functionsthat initialize respectively de-initialize data structures and threads of the AUTOSAR Runtime for Adaptive Applications. - general
error handling, operation for abnormal termination of processes.
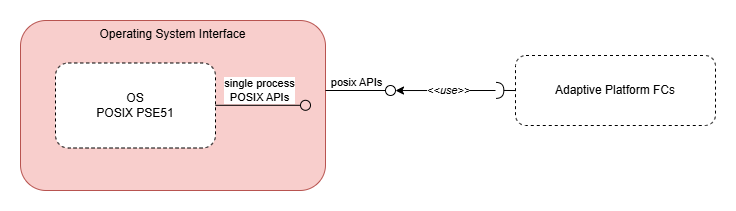
Operating System Interface: provide functionality for implementing multi-threaded real-time embedded applications and corresponds to the POSIX PSE51 profile
TBD: unclear, direct call from C namespace or additional wrapper layer code, any additional manage logic required?
I.2 Communication
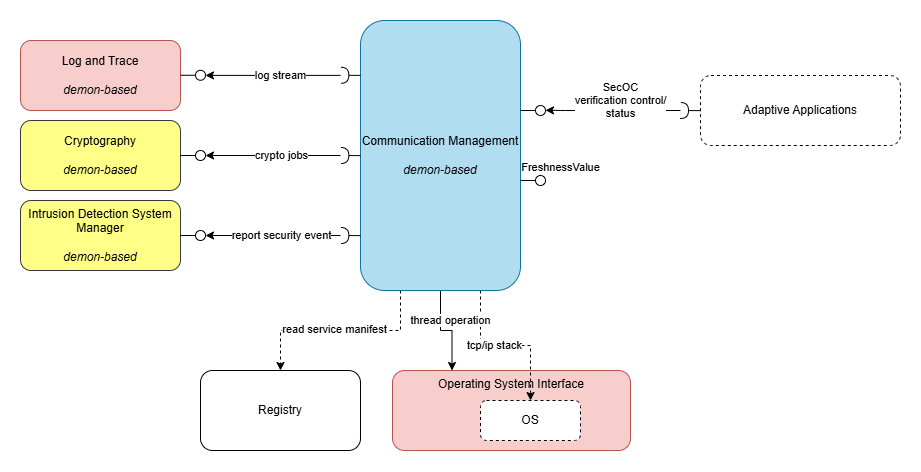
Communication Management: responsible for all levels of service-oriented communication between applications in a distributed real-time embedded environment. That is, intra-process communication, inter-process communication and inter-machine communication.
- force to accept or to drop a message with or without performing the verification of authenticator or independent of the authenticator verification result.
- obtain current freshness value for received/transmitted messages.
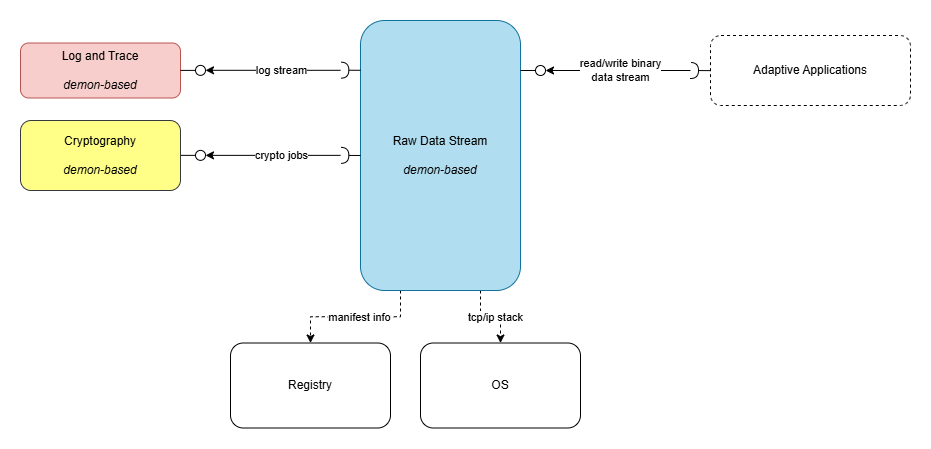
Raw Data Stream: responsible for raw communication between applications in a distributed real-time embedded environment
- provide client/server interface for read/write raw binary data stream over network connection
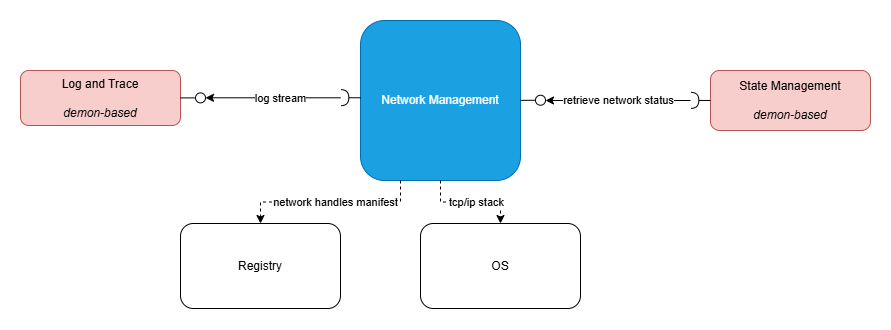
Network Management: request and query the network states for logical network handles
- obtain the current network state or requested state, i.e. if the PNC / VLAN / Physical Network is currently active/not active or is requested/released.
- set a new requested network state
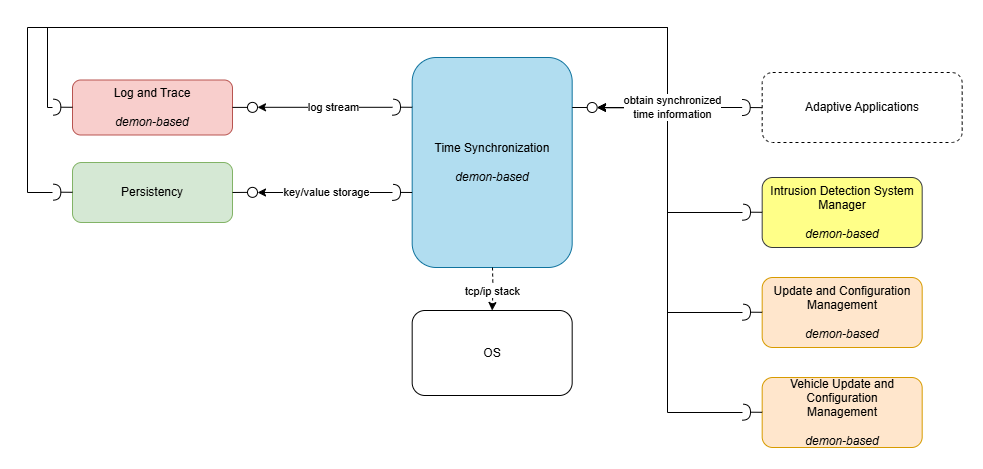
Time Synchronization: provides synchronized time information in distributed applications
- provide interface to get/set the current time point, the rate deviation, the current status and the received user data(?)
I.3 Storage
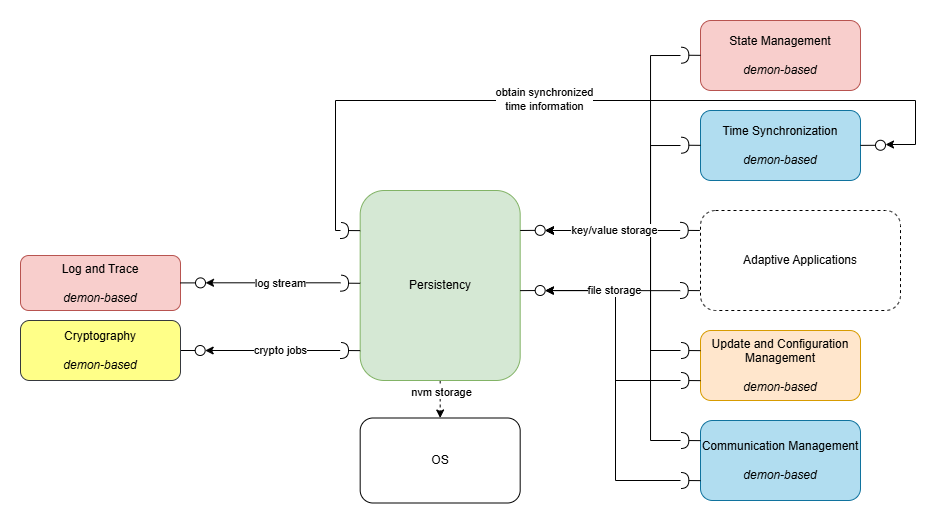
Persistency: store and retrieve information to/from non-volatile storage of a Machine.
- persistent data is always
private to one Processand is persisted across boot and ignition cycles (only path of exchange data is Communication Management) - supports concurrent access from multiple threads of the same application running in the context of the same Process.
- offers integrity, confidentiality via EDC, ECC and encryption.
- file storage, key-value pairs storage
I.4 Security
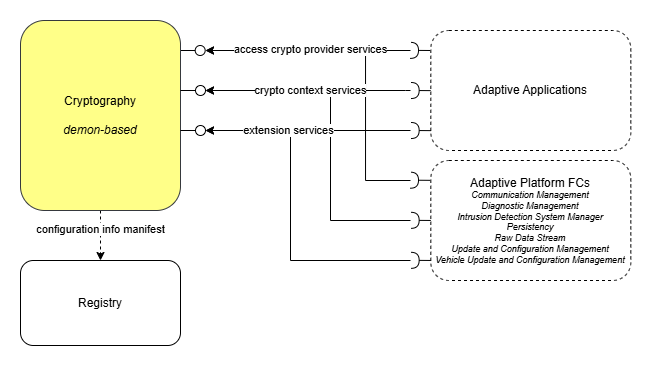
Cryptography: provides various cryptographic routines to ensure confidentiality of data, to ensure integrity of data (e.g., using hashes), and auxiliary functions for example key management and random number generation.
- support encapsulation of security-sensitive operations.
- provide crypto, key storage, x509 certificate processing interfaces.
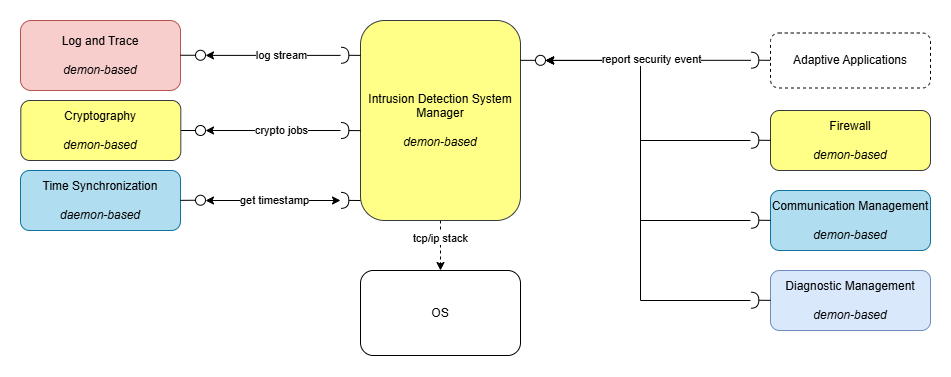
Intrusion System Detection Manager: provides functionality to report security events.
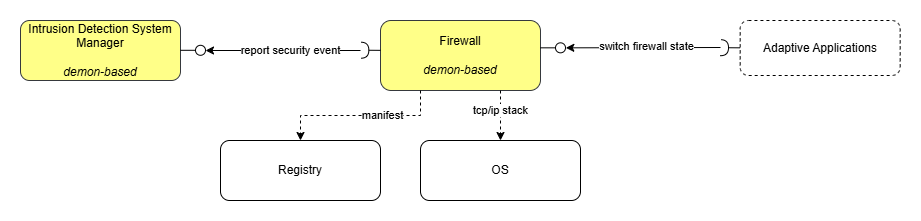
Firewall: responsible for filtering network traffic based on firewall rules to protect the system from malicious messages.
- parses the firewall rules from the Manifest and configures the underlying firewall engine accordingly.
- handling of different modes (e.g. driving, parking, diagnostic session) by enabling/disabling firewall rules based on the active mode.
- report security event to Intrusion Detection System Manager
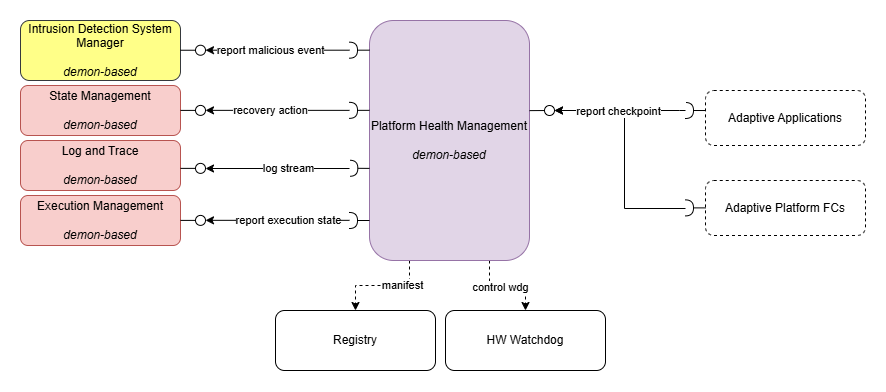
I.5 Safety
Platform Health Manager: perform safety-critical processes execution monitoring and manage watchdog operation.
- performs (aliveness, logical, and deadline) supervision of Processes in safety-critical setups and reports failures to State Management.
- controls the Watchdog that in turn supervises the Platform Health Management.
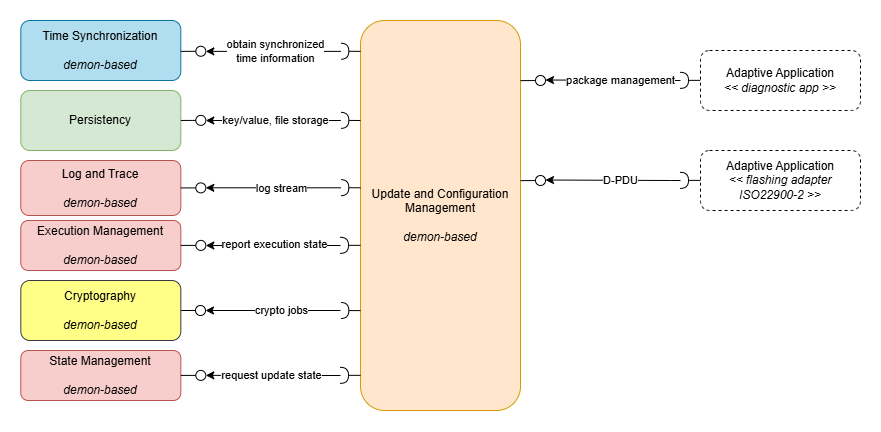
I.6 Configuration
Update and Configuration Management: responsible for updating, installing, removing and keeping a record of the software on an AUTOSAR Adaptive Platform in a safe and secure way.
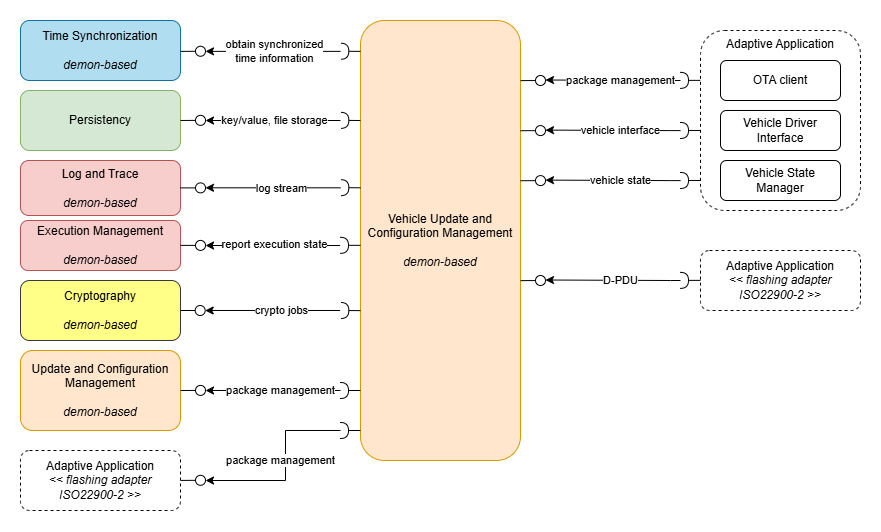
Vehicle Update and Configuration Management: responsible for updating, installing, removing and keeping a record of the software installed in an entire vehicle.
- enables to update the software and its configuration flexibly through over-the-air updates (OTA).
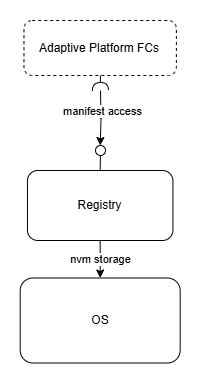
Registry: provides access information stored in the Manifest(json file structure), intended to be used by Platform FCs only.
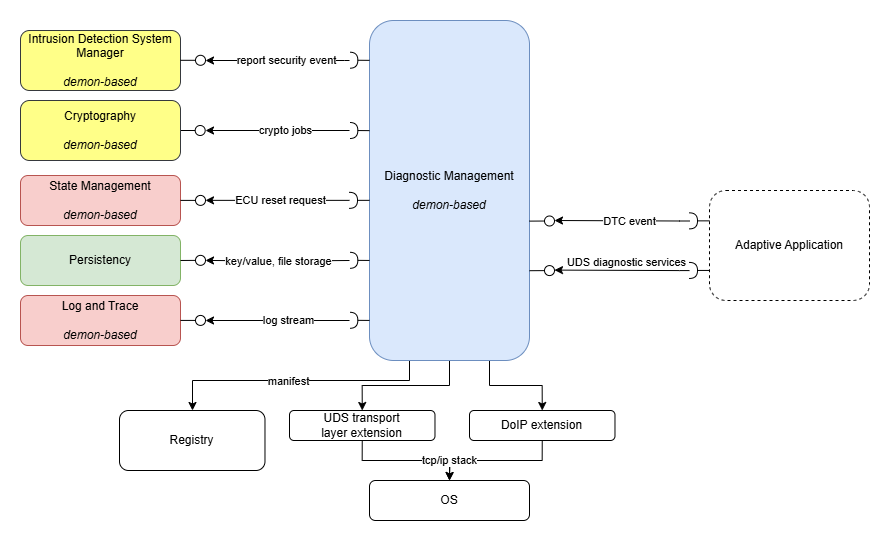
I.7 Diagnostic
Diagnostic Management: responsible for handling diagnostic functionalities.
- manage diagnostic events produced by the individual Processes.
- provides access to diagnostic data for external Diagnostic Clients via standardized network protocols (ISO 14229, 13400).
II. Adaptive AUTOSAR Development Methodology
AUTOSAR_AP_TR_Methodology
Development methodology is a common technical approach (i.e. development steps and corresponding outputs). Adaptive AUTOSAR development methodology is built upon the existed Classic Platform (an extension without re-invent the wheel).
what are development activities?
in term of software
OEM: define vehicle function architecture
Tier1: develop and integrate ECUs with CP, AP or mixed CP/AP or non-AUTOSAR
Other supplier: develop platform or specific component softwares

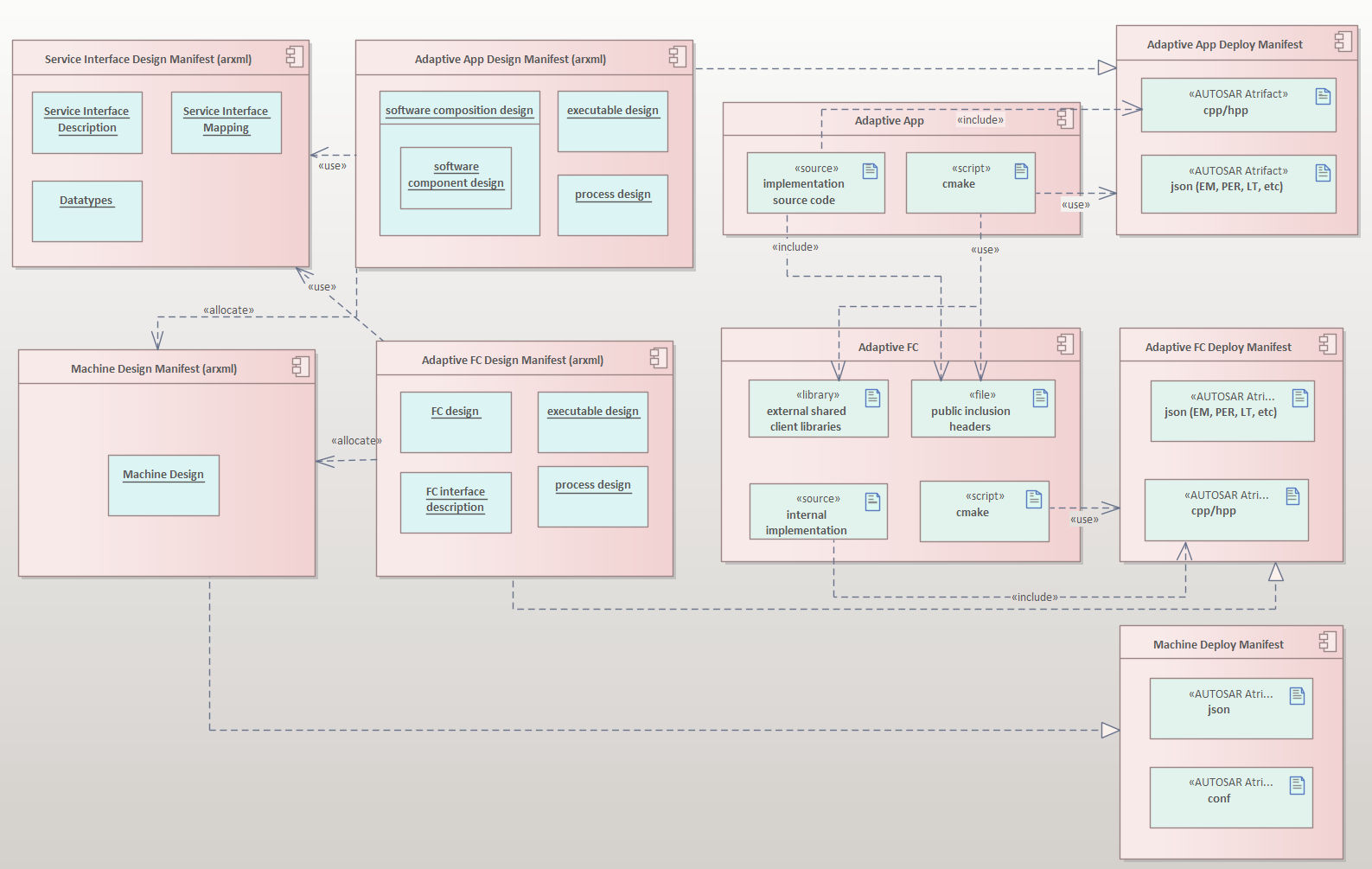
Above figure shows a generic top-down approach methodology of Adaptive AUTOSAR development.
In term of deployment, on ECU level, Adaptive AUTOSAR is slightly different compare to Classic AUTOSAR. But for the development in general, the Adaptive Application development[application] and Machine configuration/integration[platform] are similar to development activities in Classic AUTOSAR(Application SWCs and BSW configuration/integration).
corresponding output artifacts?
So what is the output artifacts from above development activities? (i.e. data exchange between involved parties in the development process).

AnalysisandDesigndocumentations as any other software development process.- Same as Classic AUTOSAR, Adaptive AUTOSAR also use
arxmlas a main medium to exchange/describe data/design such as: description of software, network topology, network communication, configuration,… - The
implementationartifacts is practically the same as thesource codeis realized in C++ and the outputexecutablesare multiple application/platform-level binaries, which aredeployed as processesin POSIX-runtime environment. - For the
configuration[manifest]: design manifestarxmli.e. configured step and corresponding deploy manfiest(pre-compile)generated code,(post-build)json,runtime environment configured filesi.e. actual deployed data.
III. Adaptive AUTOSAR concept
AUTOSAR_FO_EXP_SWArchitecturalDecisions, AUTOSAR_AP_EXP_PlatformDesign, AUTOSAR_AP_EXP_SWArchitecture, AUTOSAR_AP_TPS_ManifestSpecification
design approach and implementation?
Crucial concepts that needs to be understand before design/implement Adaptive Platform: POSIX OS system call, kernel IPC, share memory mechanism, filesystem, processes, executable, thread, concurrency.
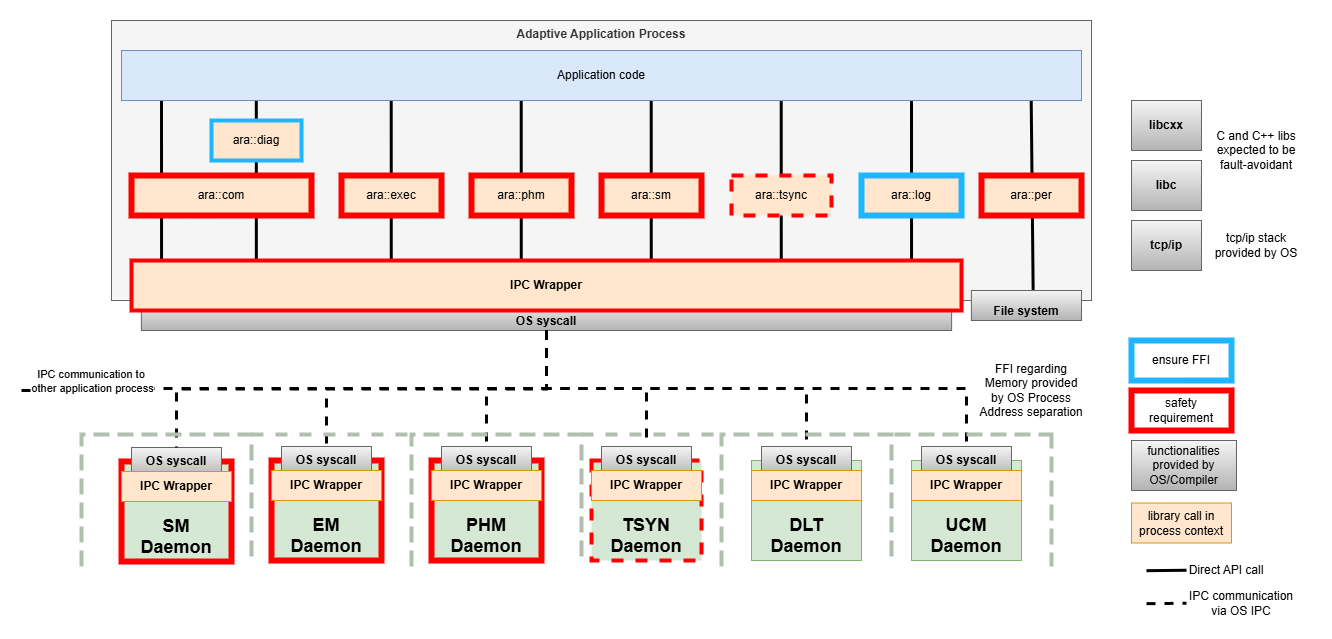
⟹ The overall system and Adaptive Platform design approach: Service-oriented-Architecture
- Each AA or AP FCs is
running in their own process, provide theirservices via interfaces. - AP FCs provide services to AA and other FCs via their
library interfaces(i.e. ara = set of FCs public C++ APIs expose to AA via header/libs ). - Communication between AAs
shall notbe done by calling IPC directly, instead the interaction between each other shall bedone via Communication Management FC, which cover both intra and inter Machine communication.
 ARA: consist of
ARA: consist of application interfaces provided by Adaptive Platform FCs
Implementation: reuse of existing standard such as STL
execution, service and machine manifest?
Manifest mean a formal specification of configuration content, combination with other artifacts (like binary files) that contain executable code to which the Manifest applies to provide specific functionalities. Manifest of a FC could be distributed into multiple physical files.
- during
design:manifest datais stored inarxmlfiles. - for the
deploy:manifest datacould take the form of a Linuxconfig file(.conf)to be loaded by kernel module or ajson file, which is loaded by Adaptive AUTOSAR FC during runtime orheader/source(.h, .cpp)configuration files to be included during build process same as AUTOSAR Classic.
 ⟹ step to change from
⟹ step to change from design Manifest to deploy Manifest data call SERIALIZATION.
In some case, it’s best to deploy directly design Manifest ARXML file.

Application Manifest: content describes all aspects of the deployment of an application, including - but not limited to - the startup configuration and the configuration of service-oriented communication endpoints on application level.
- software component and composition design
- executable description
- process design
Machine Manifest: (per machine) runtime manifest that describe deployment-related content that applies to the configuration of just the underlying machine.
- network interface configuration.
- machine(ECU) available hardware resources, states.
⟹ actual implementation should be a group of Manifest files for machine specific configuration
Service Manifest: (per process) runtime manifest that describes how service-oriented communication on transport layer level is bound to endpoints in the application and (in some cases) platform software
- datatype for adaptive platform
- service interface definition
Execution Manifest: (per process) runtime manifest that specify the deployment-related information of applications running on the AUTOSAR adaptive platform, bundled with the actual executable code to support the integration of the executable code onto the machine, and keep the application software code as independent as possible from the deployment scenario.
- binding of executable to actual process and related attributes such as timing, priority, resources,..
- start-up configuration and dependencies between processes and their states
how adaptive AUTOSAR software deployment work?
So after complete the implementation, you shall have the following output artifacts:
- AA, FC executables
- their corresponding shared libs and external/public headers
- their corresponding deployment manifest (.json, .conf)
Integration and deployment of software (on the Adaptive Platform) refers to all activities that are necessary to make designated software run on a specific machine, determined by its hardware, connected networks, its operating system and (some) platform-level Adaptive Software.
How can you integrate/deploy these artifacts into machines environment?
